Воронежская областная общественная организация «Федерация парусного спорта»
Краткое описание панели приборов
TWS (True Wind Speed || Скорость истинного ветра). Собственно скорость истинного ветра 🙂
TWD (True Wind Direction || Направление истинного ветра). Это угол между направлением истинного ветра и направлением на север.
Незаменимый прибор для определения шифтов (заходов и отходов ветра).
0° — север; 90° — восток; 180° — юг; 270° — запад;
Hdg (Heading || Курс яхты). Это угол между направлением на север и ДП (диаметральная плоскость) яхты.
Собственно, это курс яхты без учета дрейфа (курс по компасу).
0° — север; 90° — восток; 180° — юг; 270° — запад;
COG (Course Over Ground || Курс яхты). Это угол между направлением на север и текущим курсом яхты. Собственно, это реальный курс яхты (т.е. с учетом дрейфа).
CNM (Course to Next Mark || Направление на следующую марку). Это угол между направлением на север и направлением на следующую марку.
Приборы CNM и COG очень удобно использовать в случаях, когда яхта выходит на знак, но он находится достаточно далеко. Выбрав курс таким образом, чтобы значения COG стало равно CNM можно обеспечить оптимальный курс на марку с учетом дрейфа яхты.
BS (Boat Speed || Скорость яхты). Скорость яхты отностительно воды (т.е. без учета дрейфа).
SOG (Speed Over Ground || Скорость яхты). Скорость яхты относительно берега\дна (т.е. c учетом дрейфа).
DNM (Distance to Next Mark || Дистанция до следующей марки). Расстояние до следующей марки.
Незаменим в престарте в режиме симмод, когда стартовая линия не видна. В данном случае прибор показывает расстояние до стартовой линии по перпендикуляру к ней.
Lowrance Point-1 GPS Antenna (Просматривает: 1)




KingIII
KingIII
Упс. Нашёл ответ на просторах сети.
«Фильтр SOG/COG усредняет векторы скорости для компенсации
колебательного движения судна, давая более четкое представление о
курсе и скорости судна. Фильтр не влияет на расчет положения GPS.
Векторы скорости, вычисленные по сигналу GPS, дают мгновенную
меру скорости и направления антенны GPS. Таким образом, COG и SOG могут
казаться неустойчивыми при определенных условиях. Например, когда судно
медленно движется по бурному морю, антенна перемещается из стороны в сторону, а также в направлении судна.
Медленно движущиеся суда или суда, плавающие в бурном море, выиграют от высокой настройки, в то время как моторная лодка, которая может быстро менять скорость и направление, выиграет от низкой настройки.»
Блог Education Marine
Поговорим о сокращениях, которые используются в радарах.
MMSI (Maritime Mobile Services Identity Number) — уникальный номер судна, на который можно отослать ЦИВ (цифровой избирательный вызов). Или, как принято говорить, DCS (Digital Selective Call). Грубо говоря, это как номер мобильного телефона судна, на который можно позвонить. Если ваш вызов примут, вы вместе перейдете на канал или частоту, которую вы предложили для переговоров. Но на практике, у 99 % случаев, используется во время тесто.
5) AZ (Alarm Zone) — зона, которую устанавливает судоводитель (чтобы спокойно спать на вахте. Шучу)). Если в эту зону заходит цель, то раздается звуковой сигнал. Используется, если нет времени постоянно сидеть возле радара.
6) TRUE-G (true ground) — трейлы или «хвосты» целей имеют истинный характер. То есть они чертятся за целью, исходя из параметров ее движения (про истинное и относительное движение и его характеристики на радаре поговорим позже).
7) VRM (Variable Range Marker) — кольцо, центром которого является наше судно, и радиус, который выбирает судоводитель. Всегда висит на радаре, практическую ценность несет на судах без ЕКДИСов. Например, по карте вы посчитали, что должны повернуть за милю до буя, выставили VRM на 1.2 мили и, как только буй попал внутрь вашего кольца, вы начинаете поворачивать.
8) EBL (Electronic Bearing Line) — линия пеленга. Можно использовать для расхождения с судами или объектами. Допустим, вы навели EBL на цель и наблюдаете — если цель смещается относительно EBL в нос, значит она и пройдет по носу, если в корму значит и пройдет по корме.
HL (Heading Line) — курсовая линия. Включает отображение курсовой линии на экране радара.
BRILL (Brilliance) — яркость дисплея.
9) PI (Parallel Index Line) — линии параллельного индексирования. Используются при отсутствии ЕКДИСА.
10) HEAD UP (H UP) — ориентация радара, когда вверху находится курс судна по гирокомпасу.
COURSE UP (C UP) — ориентация радара, когда сверху находится истинный курс судна.
NORTH UP (N UP) — ориентация радара, когда сверху находится север.
RM/TM (Relative Motion / True Motion) — относительное движение / истинное движение.
ANT (Antenna) — антенна.
11) TT ALARM (Target Tracking alarm) — тревога при потере цели.
12) ACK (Acknowledge) — квитирование аларма
Отличный список аббревиатур можно скачать ниже.
Abbreviations.
Как ARPA и ECDIS обсчитывают данные от AIS цели?
Правила форума
Тема или сообщение будет удалена, если
1. В названии нет вопроса
Каждое название должно быть коротким вопросом.
2. Сообщение не содержит ответ
Каждое сообщение может содержать только ответ или, иногда, уточнение вопроса.
![]()
![]()
pavelliapunov
кто вам сказал, ECDIS/ARPA обсчитывают AISовскую цель по CSW/STW? ARPA/ECDIS выдает вам вектор вашего суда относительно воды. А вектор цели АИС так и остается постоянным (SOG/COG), а цифровые значения получаются относительно грунта.
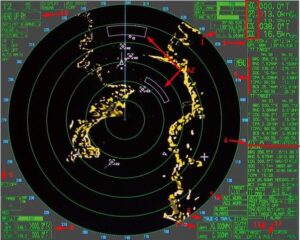
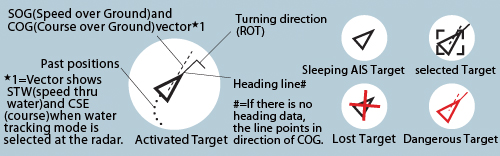
Товарищ, мне никто ничего не говорил. Попробуйте переключите в АРПЕ ввод скорости не от GPS, а от лага, как того требует ИМО и Вы увидете что в данных по вашей захваченной АИС-цели COG и SOG цели превратятся в CTW и STW. Вот мне и стало интересно КАК это получается и поэтому я эту тему создал, потому что знаю что АИС сам по себе как прибор посылает нам только COG и SOG. Дабы не быть голословным, вот брошюра радара Фуруно. Там пролистайте немного вниз до раздела АИС ЦЕЛИ и там картинка будет. На картинке приписка со звездочкой, что COG и SOG в режиме WATER TRACKING будут отображаться как STW и CTW
Добавлено спустя 1 минуту 57 секунд:
http://www.furuno.com/en/merchant/radar/ вот ссылка на брошюру радара и там ясно это показано. Мне непонятно по какому принципу идет перестроение вектора
Добавлено спустя 15 минут 27 секунд:
БРОСИЛ ВСЁ, КУПИЛ ЯХТУ НА КАРИБАХ!
На гонках Кубка Америки показывают VMG. Поскольку лодки идут галсами, скорость лодки по курсу (VMC) может быть больше 50 узлов, но VMG, как правило, редко доходит до 40 узлов.
Нынче когда космические корабли бороздят просторы вселенной, люди научились таки выводить все данные на одну шину данных!
Это да. Но называть одно и то же разными именами, и разные вещи одним именем они при этом не разучились.
Иными словами насколько хорошо соотношение курса И скорости лодки к углу ветра.
Считается на базе скорости ветра угла ветра и скорости лодки относительно воды (по показаниям лага).
VMG по GPS это практически VMC по ветру.
А я думал, тут про яхту на Карибах.
Впрочем кнопочку «Протест» никто не отменял.
А чего ж я, салага, буду против уважаемых коллег протестовать? Намекнуть.. ну, конечно.
Ибо изначальный клон (а вернее только надписи на корпусе иные) это вот:
Это же является ответом на вопрос почему нет больше ничего «виктроновского»
Этот самый фангпусун или как их там, делал 100% OEM производство этих контроллеров для виктрона, включая заливку firmware в микропроцессор.
Видать «эффективный манагер» какойто в виктроне постарался. (просто ИМХО)
Естественно китайцы такое мимо себя упустить не могли, и начали выпускать это под своим именем и более чем в вдвое дешевле. Или даже втрое.
Напомнило:
«Дорогой, то что мы считали оргазмом на самом деле было астмой!»
Именно чтоб различать компоненту скорости к ветру и компоненту скорости к курсу и ввели два параметра: vmg и vmc.
Рулевой 1-го класса
У ТС вроде появилась подруга, почему здесь не раскрыт этот важный для моряка вопрос?
