Что такое эвольвентная передача


Для параметров зубчатого колеса справедливы следующие соотношения
 — диаметр окружности произвольного радиуса,
— диаметр окружности произвольного радиуса,
 — диаметр делительной окружности,
— диаметр делительной окружности,
 — шаг по окружности произвольного радиуса,
— шаг по окружности произвольного радиуса,
 — шаг по делительной окружности,
— шаг по делительной окружности,


В зависимости от соотношения между толщиной зуба и шириной впадины на делительной окружности зубчатые колеса делятся на:

Более подробно познакомиться с основными определениями и расчетными зависимостями можно в литературе [ 11.1 ] и в ГОСТ 16530-83.
Толщина зуба колеса по окружности произвольного радиуса .

Толщина зуба по дуге делительной окружности

Угловая толщина зуба по окружности произвольного радиуса из схемы на рис. 12.2

Подставляя в формулу угловой толщины эти зависимости, получим


Методы изготовления эвольвентных зубчатых колес .
Существует множество вариантов изготовления зубчатых колес. В их основу положены два принципиально отличных метода:
Из вариантов изготовления по способу копирования можно отметить:
Из вариантов изготовления по способу огибания наибольшее распространение имеют:
Для сокращения номенклатуры режущего инструмента стандарт устанавливает нормативный ряд модулей и определенные соотношения между размерами элементов зуба. Эти соотношения определяются:

По ГОСТ 13755-81 значения параметров исходного контура должны быть следующими:
Исходный производящий контур отличается от исходного высотой зуба h 0 = 2.5m.
Станочным зацеплением называется зацепление, образованное заготовкой колеса и инструментом, при изготовлении зубчатого колеса на зубообрабатывающем оборудовании по способу обката. Схема станочного зацепления колеса и инструмента с производящим контуром, совпадающим с исходным производящим контуром, изображена на рис. 12.4.

Основные размеры зубчатого колеса .
Определим основные размеры эвольвентного зубчатого колеса, используя схему станочного зацепления (рис. 12.4).



Так как стночно-начальная прямая перекатывается в процессе огибания по делительной окружности без скольжения, то дуга s-s по делительной окружности колеса равна ширине впадины e-e по станочно-начальной прямой инструмента. Тогда, c учетом схемы на рис. 12.5, можно записать


Виды зубчатых колес (Классификация по величине смещения) .
В зависимости от расположения исходного производящего контура относительно заготовки зубчатого колеса, зубчатые колеса делятся на нулевые или без смещения, положительные или с положительным смещением, отрицательные или с отрицательным смещением.

Подрезание и заострение зубчатого колеса .

На рис. 12.7 изображены два эвольвентных зуба для которых

Для термобработанных зубчатых колес с высокой поверхностной прочностью зуба заострение вершины зуба является нежелательным. Термообработка зубьев (азотирова-ние, цементация, цианирование), обеспечивающая высо Рис. 12.7 кую поверхностную прочность и твердость зубьев при сохранении вязкой серцевины, осуществляется за счет насыщения поверхностных слоев углеродом. Вершины зубьев, как выступающие элементы колеса, насыщаются углеродом больше. Поэтому после закалки они становятся более твердыми и хрупкими. У заостренных зубьев появляется склонность к скалыванию зубьев на вершинах. Поэтому рекомендуется при изготовлении не допускать толщин зубьев меньших некоторых допустимых значений. То есть заостренным считается зуб у которого

При этом удобнее пользоваться относительными величинами [s a /m ]. Обычно принимают следующие допустимые значения
улучшение, нормализация [s a /m ] = 0.2;
цианирование, азотирование [s a /m ] = 0.25. 0.3;
цементация [s a /m ] = 0.35. 0.4.
Подрезание эвольвентных зубьев в станочном зацеплении
iSopromat.ru

Эвольвентное зацепление зубчатых колес удовлетворяет основному закону зацепления, обеспечивает постоянство передаточного отношения, допускает отклонение межосевого расстояния зубчатых передач и точно стандартизируется.
Подавляющее большинство зубчатых передач, применяемых в технике, имеет зубчатые колеса с эвольвентным профилем.
Эвольвента как кривая для формирования профиля зуба была предложена Л. Эйлером. Она обладает значительными преимуществами перед другими кривыми, применяемыми для этой цели, – удовлетворяет основному закону зацепления, обеспечивает постоянство передаточного отношения, нечувствительна к неточностям межосевого расстояния (что облегчает сборку), наиболее проста и технологична в изготовлении, легко стандартизируется (что особенно важно для такого распространенного вида механизмов как зубчатые передачи).
На следующем видео показан пример эвольвентного зацепления зубчатых колес
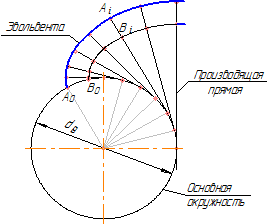
Эвольвента – это траектория движения точки, принадлежащей прямой, перекатывающейся без скольжения по окружности. Данная прямая называется производящей прямой, а окружность, по которой она перекатывается – основной окружностью (рисунок 38 а).
Эвольвента обладает следующими свойствами, которые используются в теории зацепления:
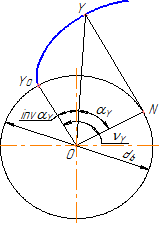
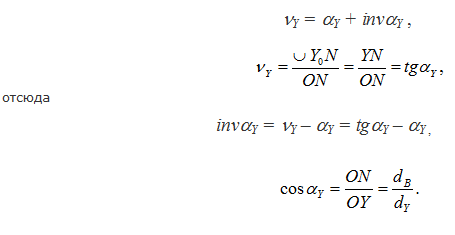
Положение любой точки на эвольвенте может быть однозначно охарактеризовано диаметром окружности, на которой она расположена, а также характерными для эвольвенты углами: углом развернутости (обозначается ν ), углом профиля ( α ), эвольвентным углом – inv α (рисунок 38 б). На рисунке 38 б показаны эти углы для произвольно выбранной на эвольвенте точки Y, поэтому они имеют соответствующий индекс:
То есть индекс показывает, на какой окружности находится рассматриваемая точка эвольвенты, поэтому для характерных окружностей используются индексы, приведенные выше.
Например: α a1 – угол профиля эвольвенты в точке, лежащей на окружности вершин первого колеса;
inv α – эвольвентный угол в точке эвольвенты, находящейся на делительной окружности колеса и т.д.
Рассмотрим свойства эвольвенты. Первое свойство имеет строгое математическое доказательство, однако в рамках данного короткого курса оно не приводится.
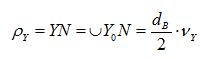
Так как при формировании эвольвенты производящая прямая перекатывается по основной окружности без скольжения, то в данный момент времени она вращается вокруг точки N (N – мгновенный центр скоростей), описывая бесконечно малую дугу окружности, которая и определяет кривизну эвольвенты в данной точке. Т.е. отрезок NY – это радиус кривизны эвольвенты в точке Y (NY= ρ Y).
Но отрезок NY в точности равен дуге NY0 (это та же дуга только вытянутая в прямую линию). Таким образом, имеем:
Чем больше радиус основной окружности, тем больше радиус кривизны эвольвенты в любой ее точке (то есть форма эвольвенты действительно определяется величиной радиуса основной окружности).
Второе свойство также легко просматривается. Так как N – мгновенный центр скоростей, то скорость точки Y перпендикулярна радиусу NY. Но скорость точки, движущейся по криволинейной траектории, направлена по касательной к этой траектории – в данном случае по касательной к эвольвенте в точке Y.
Перпендикуляр к касательной – есть нормаль, поэтому прямая YN с одной стороны является нормалью к эвольвенте в точке Y, с другой стороны является касательной к основной окружности (как производящая прямая, перекатывающаяся по основной окружности).
То, что точка N является центром кривизны эвольвенты в точке Y, показано при рассмотрении первого свойства. Запишем некоторые зависимости, которые используются в дальнейшем при изучении геометрии эвольвентного зацепления (получаются из рассмотрения рисунка 38 б):
Третье свойство эвольвенты очевидно из рисунка 38а. Действительно, если на производящей прямой взять две точки (А и В), то они будут описывать две совершенно одинаковых эвольвенты, причем, как бы не перемещалась производящая прямая, расстояние между этими точками не изменяется (AiBi = Const). Т.е. действительно это эквидистантные (равноотстоящие друг от друга) кривые. Но, самое важное, что это расстояние AiBi равно расстоянию между этими эвольвентами, измеренному по дуге основной окружности:
Признаком того, что два криволинейных профиля касаются (а не пересекаются), является наличие у них в точке контакта общей нормали. В связи с этим контакт двух эвольвентных профилей происходит на общей касательной к основным окружностям N1N2 (рисунок 39), которая одновременно будет являться общей нормалью к этим профилям в точке их касания в любой момент времени (на основании второго свойства эвольвенты).
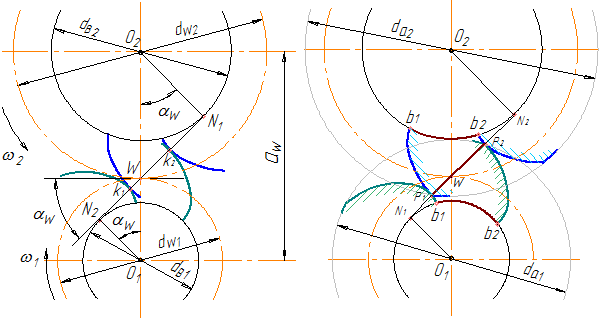
Геометрическое место точек контакта профилей, которое они занимают в процессе работы пары зубьев, называется линией зацепления. Таким образом, в эвольвентной передаче линией зацепления является прямая N1N2 (общая касательная к основным окружностям).
На рисунке 39 а показано зацепление двух эвольвентных профилей в разные моменты времени. В обоих положениях прямая N1N2 является общей нормалью к этим касающимся профилям и проходит через полюс зацепления W (мгновенный центр относительного вращения).
Это, с одной стороны показывает, что эвольвентные профили удовлетворяют основному закону зацепления, с другой стороны обеспечивают постоянство передаточного отношения, т.к. полюс зацепления не меняет своего положения в процессе работы пары (отношение O2W/O1W остается постянным).
С изменением межосевого расстояния будет меняться только положение линии зацепления, но вся картина зацепления останется такой же, т.е. по-прежнему будет сохраняться основной закон зацепления, величина и постоянство передаточного отношения. Это очень важное свойство эвольвентного зацепления, т.к. позволяет вписывать передачу в разные межосевые расстояния, что особенно важно при проектировании коробок скоростей, планетарных и дифференциальных механизмов.
Передача оказывается малочувствительной к неточностям межосевого расстояния, что позволяет снизить требования к точности сборки.
Отрезок N1N2 называется теоретической линией зацепления. На этом участке происходит нормальная работа двух неограниченных эвольвент.
В реальной передаче эвольвенты ограничены («обрезаны») окружностями вершин, поэтому вся работа пары происходит на участке линии зацепления P1P2, заключенном между окружностями вершин (рисунок 39б).
Отрезок P1P2 называется рабочей (активной) частью линии зацепления (иногда называют просто «рабочая линия зацепления», или «активная линия зацепления»). На рисунке 39б показано два положения одной и той же пары: в начале зацепления (зуб ведомого колеса работает своей вершиной, зуб ведущего колеса – нижней рабочей точкой профиля Р1), и в конце зацепления (зуб ведущего колеса работает своей вершиной и в следующий момент выйдет из зацепления, зуб ведомого колеса работает своей нижней рабочей точкой профиля Р2).
Примечание: здесь термин «нижняя» или «верхняя» точка относится к положению точек относительно основной окружности, независимо от того, как эти точки располагаются одна относительно другой в пространстве. Из двух рассматриваемых точек профиля «нижней» будет та, которая располагается ближе к основной окружности.
При увеличении радиуса основной окружности до бесконечности радиус кривизны эвольвенты в любой ее точке также становится бесконечно большим, т.е. основная окружность и эвольвента превращаются в прямые линии. Эвольвентное зубчатое колесо превращается в зубчатую рейку с прямолинейным профилем зуба.
Таким образом, рейка с прямолинейным профилем зуба представляет собой частный случай эвольвентного зубчатого колеса и обладает всеми его свойствами, т.е. может работать с любым эвольвентным колесом (при одном и том же модуле) без нарушения основного закона зацепления. При этом вращательное движение колеса преобразуется в поступательное движение рейки или поступательное движение рейки преобразуется во вращательное движение колеса с соблюдением постоянства передаточного отношения.
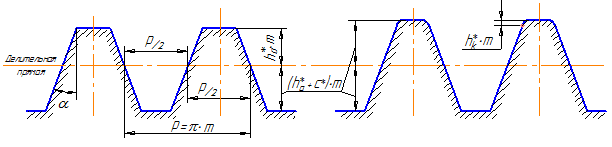
Т.к. зубчатая рейка с прямолинейным профилем зуба с одной стороны имеет простые формы и легко задать размеры ее элементов, с другой стороны представляет собой эвольвентное зубчатое колесо, то ее параметры положены в основу стандартизации эвольвентных зубчатых колес. Стандартная зубчатая рейка называется исходным контуром (рисунок 40а).
Имеется несколько стандартов на исходные контуры, учитывающие специфику некоторых видов передач (мелкомодульных, конических и т.д.). В основном используются параметры, определенные ГОСТ 13 755 – 81.
В соответствии с этим стандартом исходный контур имеет следующие параметры:
Приведенные коэффициенты являются безразмерными величинами. Абсолютное значение какого-либо размера получается умножением соответствующего коэффициента на модуль (Например: высота головки зуба ha=ha * ∙m; величина радиального зазора c = c*∙m и т. д.).
Таким образом, форма зуба остается постоянной, а абсолютные размеры определяются модулем (т.е. модуль является как бы коэффициентом пропорциональности).
По высоте зуб исходного контура делится на головку и ножку. Это деление осуществляется делительной прямой. Делительная прямая рейки – это прямая, на которой толщина зуба равна ширине впадины (рисунок 40б).
Высота ножки зуба несколько больше головки для обеспечения радиального зазора между вершинами зубьев одного колеса и окружностью впадин другого после сборки передачи.
Стандартные параметры исходного контура на эвольвентное колесо «переносятся» через делительную окружность (на делительной окружности шаг равен стандартному шагу исходного контура p= π ∙ m, угол профиля равен углу профиля исходного контура α = 20 0 ).
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Эвольвентное зубчатое зацепление
Эвольвентное зацепление – сцепление механических элементов зубчатым способом, в основе которого стоят зубья. Боковины в данном случае выполнены в виде симметрично расположенных эвольвент. Такая форма сцепления позволяет добиться стабильного, беспрерывного передаточного отношения.
Эвольвента – кривая, которой характерен переменный радиус кривизны. Основой такой кривой является точка на прямой, по которой кривая обкатывается без скольжения по окружности. Диаметр образованной окружности выступает основой.
Подобное сцепление значительно превосходит аналоги, так как в отличие от других типов, имеет стабильное сцепление. Впервые было предложено Л. Эйлером. Позволяет избавиться от неточностей межосевых расстояний, что значительно облегчает монтаж. Его также легко стандартизировать и изготовить.

Построение эвольвентного зацепления
Существует несколько способов построения эвольвентного зацепления, используемого для изготовления зубчатых колес, которые можно выполнять вручную или с помощью систем автоматического построения.
При проектировании зацепления зубчатых колес учитывают не только геометрические параметры, но и технологические процесс изготовления, а также желаемые динамические и прочностные показатели готового механизма.

Построение эвольвенты зубчатого колеса состоит из нескольких этапов:
При производстве шестерен зубья несколькими методами: копирования и обкатки. Если необходимо изготовить мелкую деталь, прибегают к методу формообразования, другими словами – горячей накатки. Такой способ менее точен, но форма фрезы при копировании не позволяет выполнить миниатюрные вырезы.
Метод копирования предусматривает вращение фрезы вдоль поверхности, образующее зубья. Она прорезает одну впадину за один проход между соседними зубьями. Затем фреза возвращается в базовое положение с одновременным поворотом заготовки на необходимый угол шага. Такой способ изготовления довольно точный, но производительность его низкая.

Более совершенным способом является метод обкатки. В его основе лежит огибающее движение, соответствующее желаемому движению зубчатого колеса при зацеплении. Процесс производства похож на движение шестерен в работе. Такое зацепление называется станочным. Рабочий инструмент в таком случае изготавливается в виде круглой, зубчатой фрезы или инструментной рейки.
Геометрические параметры
Построенные проекта будущего колеса начинается с расчета его параметров.
Рассмотрим параметры эвольвентного зацепления:
Шаг бывает двух видов:
Модуль — диаметр круга шестерни в миллиметрах, измеряемый к одному зубу. Делится на три вида: начальный (показатель окружности колеса начальной поверхности), основной и делительный (окружность колеса со стандартными значениями модуля и шага).
Число зубьев может быть разное, и зависит от диаметра шестерни, технических параметров и свойств готового механизма. К их параметрам можно отнести:
Угол профиля определяется между определенной точкой зуба, которая лежит на делительной окружности шестерни и вектором, прочерченным к точке от центра круга.
Подобное сцепление используется в различных сферах. Его легко встретить в машиностроении (в коробках передач автомобилей, в строительной, военной, сельскохозяйственной технике, судостроении, гидронасосах, лебедках и часовых механизмах).
На сегодняшний день можно найти множество разновидностей подобных шестерен, которые имеют различные свойства и геометрию. При выборе зубчатых колес в первую очередь нужно обращать внимание на прочность и шумовые характеристики. Особого внимания требует твердость метала, что особо важно для нормальной работы соответствующего механизма.
Что такое эвольвентная передача
Два твердых тела (звена), соприкасающиеся своими поверхностями и имеющие возможность двигаться относительно друг друга, образуют кинематическую пару. Кинематическая пара допускает не любое движение звеньев относительно друг друга, а только такое движение, которое согласуется с характером соприкосновения и с формой соприкасающихся поверхностей.
Как следует из вышеизложенного, характер относительного движения звеньев КП и геометрия их контактирующих поверхностей находятся в тесной взаимосвязи. Изучение геометрии контактирующих поверхностей в связи с их относительным движением составляет предмет раздела прикладной механики, который называется теорией зацепления [ 1, 2 ].
Механизмы с высшими кинематическими парами и их классификация.
К механизмам с высшими КП относятся любые механизмы в состав которых входит хотя бы одна высшая пара. Простейший типовой механизм с высшей парой состоит из двух подвижных звеньев, образующих между собой высшую кинематическую пару, а со стойкой низшие ( вращательные или поступательные ) пары. К простейшим механизмам с высшей парой относятся :
Структурные схемы простейших механизмов с высшими КП..

Основы теории высшей кинематической пары.
Основная теорема зацепления.

V Pi = V Pj ; V PiPj = 0 ;
Передаточное отношение для тел совершающих вращательное движение.




Условием существования высшей кинематической пары является условие неразрывности контакта звеньев, которое заключается в том, что проекции скоростей звеньев в точке контакта на контактную нормаль к профилям должны быть равны

т.е. скалярное произведение вектора относительной скорости в точке контакта на орт нормали равно нулю. Это условие обеспечивается, если скорость относительного движения контактных точек лежит на касательной ( в пространстве в касательной плоскости ). При выполнении этого условия профили не отстают друг от друга ( нарушение контакта приведет к исчезновению пары ), и не внедряются друг в друга
( что при принятом допущении о абсолютно жестких звеньях, невозможно ).
Как было показано выше скорость относительного скольжения в точке контакта равна

Основная теорема зацепления.
Формулировка анализа. Контактная нормаль к профилям высшей пары пересекает линию центров в полюсе относительного вращения звеньев ( то что полюс делит линию центров на отрезки обратно пропроциональные угловым скоростям было доказано выше ).
Формулировка синтеза. Профили в высшей кинематической паре должны быть выполнены так, чтобы контактная нормаль к ним проходила через полюс относительного вращения звеньев.
Так как положение полюса на линии центров определяет передаточное отношение механизма, то профили удовлетворяющие основной теореме зацепления обеспечивают заданный закон изменения передаточного отношения или являются сопряженными.
Скорость скольжения в высшей КП или перовое следствие основной теоремы зацепления.
Скорость скольжения профилей в высшей КП равна произведению скорости относительного вращения на расстояние от контактной точки до полюса зацепления.


Из формулы видно, что скорость скольжения во внутреннем зацеплении много меньше, чем во внешнем.
Определение центра вращения ведущего звена или второе следствие основной теоремы зацепления.
Из схемы, изображенной на рис. 11.7, видно, что

Второе следствие основной теоремы зацепления.
С использованием этого свойства механизма с высшей парой при проектировании кулачковых механизмов определяют радиус начальной шайбы по допустимому углу давления.
Угол давления в высшей паре ( на примере плоского кулачкового механизма ).
Рассмотрим плоский кулачковый механизм с поступательно движущимся роликовым толкателем ( Рис. 11.9). Из D BPF


Подставляя эти выражения в формулу для тангенса угла давления, получим





из треугольника D OM y N


получим параметрические уравнения эвольвенты.
Эвольвентное зацепление и его свойства.
В зубчатой передаче контактирующие элементы двух профилей выполняются по эвольвентам окружности и образуют, так называемое эвольвентное зацепление. Это зацепление обладает рядом полезных свойств, которые и определяют широкое распространение эвольвентных зубчатых передач в современном машиностроении. Рассмотрим эти свойства.




