RAIL TRACK 700
МИКРОПРОЦЕССОРНАЯ СИСТЕМА СЧЕТА ОСЕЙ
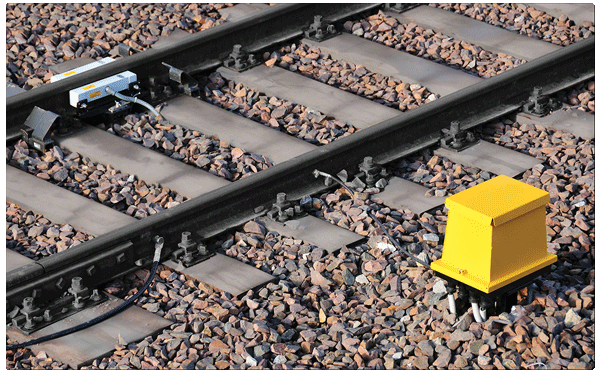
Микропроцессорная система счета осей (ССО) компании «1520 Сигнал» предназначена для определения свободности участков пути любой сложности и конфигурации на станциях и перегонах методом счета осей с использованием датчиков колеса. Систему успешно применяют вместо рельсовых цепей. Система имеет двухканальную архитектуру и диверсифицированное ПО. Система соответствует европейским (CENELEC SIL4) и российским требованиям безопасности, устойчива к вибрациям, имеет систему грозозащиты и способна работать даже в условиях Крайнего Севера.
Преимущества и особенности
Определение свободности участков путей на станциях и перегонах.
Взаимодействие с любой системой СЦБ.
Цифровая увязка с МПЦ.
Размещение путевых датчиков колес на рельсах любого типа на участках как с электрической (любого рода тока), так и с автономной тягой.
Оснащение участков, где использовать рельсовые цепи слишком дорого или технически невозможно.
Структура и состав

ФУНКЦИИ И ПРИНЦИП ДЕЙСТВИЯ
Система счета осей определяет занятое и свободное состояние секций, ограниченных напольными датчиками колеса. Информация от датчиков колеса собирается, анализируется и обрабатывается процессором. Данные о числе осей, которые заехали на соответствующую секцию и выехали из нее, позволяют системе определить свободное или занятое состояние секции, а затем через релейную или электронную увязку передать информацию в систему централизации.
Гибкая архитектура системы счета осей обеспечивает взаимодействие с системами СЦБ разных типов и с разной элементной базой, конфигурируется под конкретный проект как в процессе изготовления, так и на месте в случае возникновения необходимости изменений в условиях работы.
Подключаемое к процессорному устройству ССО диагностическое оборудование позволяет вести просмотр записей о работе и состоянии системы.
ВЫСОКАЯ НАДЕЖНОСТЬ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ ЭКСПЛУАТАЦИИ
Наша система счета осей подтвердила свою высокую надежность в экстремальных условиях эксплуатации «пространства 1520» — от суровых зимних просторов Якутии до пустынь Монголии и Казахстана. Специальное диагностическое оборудование упрощает техническое обслуживание напольных и постовых компонентов системы.
ГЛУБОКАЯ ИНТЕГРАЦИЯ В МПЦ
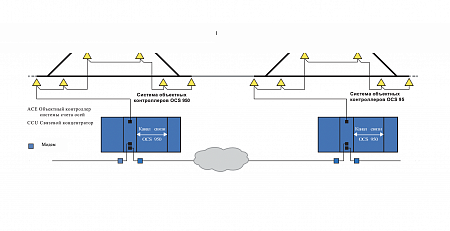
При использовании системы счета осей в составе МПЦ не требуется установка отдельного шкафа с процессорным устройством — его функции выполняет плата ACE, интегрированная в состав системы объектных контроллеров МПЦ. Это дает существенную экономию места и повышает экономическую эффективность технического решения для заказчика.
РАСШИРЕНИЕ МАСШТАБОВ ВНЕДРЕНИЯ
В Казахстане и Монголии система счета осей контролирует свободность пути на перегонах и станциях, обеспечивая резервирование системы интервального регулирования движения поездов СИРДП. В 2015 году ССО впервые была внедрена в Латвии, где контролирует свободность путей на стации Криевусала. Система также внедряется на железных дорогах Азербайджана.
Системы счета осей
Структура и принцип работы
В отличие от рельсовых цепей, непосредственно устанавливающих свободность или занятость участка пути, система счета осей работает опосредованно. Если в начальный период участок был свободным, а затем число въехавших и выехавших колесных пар совпало, участок регистрируется как свободный от подвижного состава. Если это условие не выполнено, участок считается занятым.
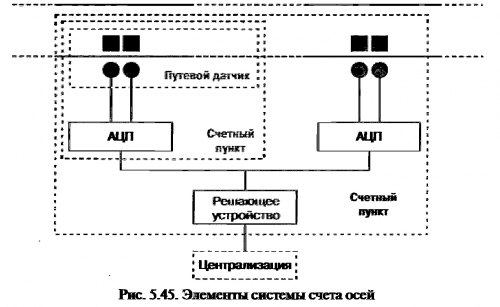
На рис. 5.45 представлена общая структура современных систем счета осей на примере контроля простейшего участка. В состав таких систем входят:
— путевой датчик (рис. 5.46), регистрирующий проезд колеса. Для определения направления движения датчики устанавливают попарно;
— аналого-цифровой преобразователь (АЦП, его называют также путевым блоком, см. рис. 5.46) преобразует аналоговый сигнал путевого датчика в цифровую информацию. АЦП обычно располагают вблизи путевого датчика, что позволяет уменьшить помехи при передаче аналогового сигнала. АЦП состоит из узлов усиления сигнала, его фильтрации и преобразования. Пример такого преобразователя представлен на рис. 5.47. Цифровое устройство ZP43 (п. 5.2.2.4) последовательно оценивает уровень и характер изменения амплитуды сигнала: после прохода через два усилителя и помехозащитный фильтр принимаемый сигнал преобразуется в напряжение прямоугольной формы, частота которого зависит от амплитуды поступившего сигнала. В завершение этого сигнал передается в полосовой фильтр, который препятствует проходу помех, имеющих посторонние частоты, но пропускает информацию от путевого датчика;
— электронное решающее устройство подсчитывает результаты и выдает информацию о свободности или занятости участка. В современных системах для этого используются безопасные микропроцессоры. В некоторых системах элементы, выполняющие задачи электронного решающего устройства, частично размещают в путевом ящике вместе с АЦП.
Электронные компоненты, а также средства передачи данных как между ними, так и от соседних систем счета осей, постов централизации и устройств ручного ввода информации должны работать безопасно. Эта задача часто решается аппаратной и программной избыточностью. При любых сомнениях секция должна считаться занятой. Требования безопасности включают в себя следующие условия [Fenner/Naumann/Trinckauf, 2003]:
— при поступлении от путевого датчика информации о проходе колеса система должна переключить участок в состояние занятости;
— даже если только один из двух путевых датчиков (п. 5.4.2) регистрирует проезд колесной пары (и потому невозможно определить направление ее движения), участок должен считаться занятым;
— секция должна считаться свободной только в том случае, если число выехавших из нее колесных пар сойдется с числом вошедших ранее;
— никакая ошибка не должна вызывать ложную свободность участка;
— система должна работать безопасно также в случае вибрации и колебаний проезжающих колесных пар;
— влияние обратного тягового тока, магнитных полей от локомотива и магнитно-рельсовых тормозов не должно приводить систему счета осей в опасное состояние.

В простейшем случае система счета осей состоит из двух счетных пунктов, расположенных по разным сторонам участка, свободность которого необходимо контролировать. Однако в современных системах к решающему устройству подключают большое число входов от расположенных вблизи путевых датчиков, что позволяет ему контролировать свободность нескольких секций (рис. 5.48). Число счетных пунктов, подключаемых к одному решающему устройству, различно в каждой модели, но обычно составляет до нескольких десятков.
Для обеспечения непрерывного контроля свободности участков, расположенных на границе зон действия соседних решающих устройств, может применяться один из следующих способов:
— выдача информации от путевого блока в обе системы счета осей при использовании дополнительного модуля в АЦП;
— обмен информацией между смежными системами счета осей (часто при помощи дополнительного модуля в решающем устройстве).

Первоначально для регистрации проехавших колесных пар применялись механические и гальванические датчики. В современных системах счета осей используются индуктивные датчики, регистрирующие изменение электромагнитного поля при проезде колеса. Детальные принципы работы датчиков различаются в зависимости от компании-изготовителя.
К путевым датчикам, применяемым в системах счета осей, предъявляются особые требования. В частности, они должны:
— фиксировать отдельно каждую ось;
— определять направление движения.
Путевой датчик, пригодный для системы счета осей, может также использоваться для получения информации о достижении поездом определенной точки пути. Современные путевые датчики непрерывно контролируют свое состояние, что необходимо для безопасной регистрации поезда, въезжающего на участок.
Регистрация направления движения колеса осуществляется в путевом датчике двумя сенсорами, имеющими общую зону перекрытия (рис. 5.49). Эта зона необходима для беспроблемной регистрации направления, особенно в случае вибрации или колебаний колеса. Проследование колеса слева направо регистрируется в следующей последовательности:
1. Сенсор 1 активирован;
2. Сенсор 2 активирован;
3. Сенсор 1 деактивирован;
4. Сенсор 2 деактивирован.
Исправление ошибок, возникающих при подсчете осей
Надежность современных систем счета осей высока, ошибки случаются редко: не более одной на 108 колесных пар [Naumann/Pachl, 2002]. Тем не менее должны учитываться возможные ошибки в подсчетах. Типичными из них являются:
— одно из проехавших колес не обнаружено;
— одно из колес подсчитано дважды;
— зарегистрирован проезд колеса, которого не было;
— зарегистрировано движение одного из колес в неправильном направлении.
В соответствии с требованиями безопасности во всех сомнительных случаях
участок считается занятым. Тем не менее две одновременно возникшие неисправности могут привести систему в опасное состояние. Например, система счета осей при выезде состава с участка ложно регистрирует две дополнительные колесные пары, в то время как один двухосный вагон отцепился от состава и остался на участке. Однако с учетом высокой надежности систем счета осей и низкой вероятности одновременного появления двух таких событий риском возникновения данной ситуации можно пренебречь.
Несмотря на возникшие ошибки, система должна продолжать работу. Обычно это требует вмешательства человека, который должен ввести ответственную команду, что снижает безопасность системы. Наиболее часто используется команда ручного сброса занятого состояния участка. Так как такая команда связана с безопасностью, необходимо исключить ошибочный сброс занятого состояния участка. Для этого предусматривают ограничения, которые различаются по железным дорогам. Ниже приведены примеры некоторых из этих ограничений:
— только определенные лица могут выдавать ответственную команду, например дежурный по станции или электромеханик СЦБ либо оба одновременно;
— сброс участка в свободное состояние возможен только тогда, когда последнее зарегистрированное системой направление движения соответствовало выезду с участка;
— перед выдачей команды работник должен убедиться в свободности секции;
— выдача команды регистрируется техническими средствами и должна быть письменно объяснена лицом, выдавшим ее;
— сразу после сброса участка в свободное состояние сигнал не может давать разрешающее показание, и первый поезд должен проследовать через него с особой бдительностью и готовностью немедленно остановиться при появлении препятствия.
Например, система счета осей Az S 350 U предлагает одну из двух функций сброса в зависимости от требований железной дороги [Siemens, 2001]:
— немедленная команда сброса: секция считается свободной сразу после выдачи команды дежурным по станции. Однако такая команда может применяться только в том случае, если последняя зарегистрированная колесная пара двигалась в направлении выезда с участка. В противном случае необходимо дать дополнительную ответственную команду;
— подготовительная команда сброса, которая обнуляет число находящихся на участке осей, но секция считается занятой до проследования через нее следующего состава. Можно устанавливать также правила проследования поезда через разветвленную секцию. Например, можно считать секцию свободной после любого проследования по ней поезда или его проследования только через те датчики, где в последний раз не совпали результаты расчета.
Помимо функции ручного сброса, разработана функция автоматической коррекции возникшей ошибки [Fenner/Naumann/Trinckauf, 2003]. Она базируется на сравнении результатов от нескольких счетных пунктов. По имеющейся у авторов информации, такая функция пока не получила практического применения из-за ее неполного соответствия перечисленным выше требованиям безопасности.
Если устанавливается неисправность работы одного из счетных пунктов, происходит его отключение от остальных устройств. В некоторых системах неисправный счетный пункт может быть исключен из логики, а разграниченные им участки объединяются в один [Fenner/Naumann/Trinckauf, 2003]. Это позволяет обеспечивать бесперебойное движение поездов, однако несколько снижает пропускную способность линии.
Датчик счета осей колесных пар
Надежная работа СЖАТ, имеющих в своем составе датчики для счета осей (ДСО), во многом зависит от достоверности первичной информации, поступающей от них. Например, ошибки в счете осей подвижного состава приводят к нарушению контроля теплового состояния букс в эксплуатируемых сейчас системах ДИСК-Б, ПОНАБ и КТСМ. В настоящее время имеются различные схемные и конструктивные решения ДСО, отличающиеся по используемым видам систем и методам обработки первичной информации. В дальнейшем познакомимся с некоторыми видами ДСО [2, 8, 15, 20].
7.1. Магнитный точечный датчик прохода колес
В датчиках магнитного типа, информационный сигнал формируется на основе эффекта электромагнитной индукции. Сигнал движения оси (биполярный импульс напряжения) возникает при перемещении гребня колеса над датчиком. Импульс достаточно просто обрабатывается электронными устройствами системы (например, пороговыми) и отождествляется с проходом оси над датчиком. Амплитуда импульса падает с уменьшением скорости состава, и при остановках колеса над датчиком напряжение практически отсутствует, поэтому рассматриваемый, датчик имеет информационное ограничение по скоростному диапазону [20].
Датчик прохода колес типа ПБМ-56, используемый в устройствах обнаружения перегретых букс и на сортировочных горках. Принцип действия датчика основан на наведении в катушке ЭДС индукции за счет изменения величины магнитного потока при проходе гребня колеса 4 (рис.7.1) в воздушном зазоре. Датчик состоит из кронштейна 1, катушки 2, постоянного магнита 3, скобы 6 и соединительного кабеля 8. С помощью кронштейна, скобы и гайки 7 датчик крепится к подошве рельса 5. Постоянный магнит установлен на кронштейне таким образом, что его поток замкнут через кронштейн, рельс и воздушный зазор между головкой рельса и одним из  полюсов магнита.
полюсов магнита.
Рис. 7.1. Датчик прохода колес ПБМ-56
Относительно простая конструкция датчика (магнит и обмотка) обусловливает его невысокую стоимость. К недостаткам датчиков магнитного типа можно отнести большие размеры, большое содержание меди и наличие сильного магнита. Это провоцирует вандализм и, в конечном счете, увеличивает затраты на обслуживание.
В момент приближения гребня колеса к зоне действия датчика магнитный поток в цепи увеличивается и достигает своего максимального значения, когда колесная пара находится над датчиком. При этом в катушке индуктивности наводится колоколообразный импульс напряжения. Когда гребень колеса удаляется из зоны действия датчика, магнитный поток в цепи уменьшается и датчик вырабатывает импульс напряжения обратной полярности. Амплитуда и длительность выходных сигналов датчика определяются скоростью изменения магнитного потока, т. е. скоростью движения поезда. Нижний предел скорости движения поезда, при котором сигналы с датчика превышают уровень наводок составляет 5 км/ч.
В магнитоиндукционном точечном путевом датчике используется генераторный первичный преобразователь, основанный на принципе электромагнитной индукции, закон которой выражается формулой
 (7.1) где
(7.1) где  – индуктируемая в катушке электродвижущая сила (ЭДС);
– индуктируемая в катушке электродвижущая сила (ЭДС);  – число витков в катушке;
– число витков в катушке;  – магнитный поток пронизывающий витки катушки.
– магнитный поток пронизывающий витки катушки.
7.2. Вибродатчики, используемые в подсистеме ДИСК-К
Вибpодатчик состоит из двух основных частей: державки и акселеpометpа с соединительным радиочастотным коаксиальным кабелем. Принцип действия акселеpометpа основан на использовании прямого пьезоэффекта, то есть свойства пьезокерамики генерировать электрический заряд под действием приложенной к пьезоэлементам механической силы.
 , (7.2)
, (7.2)
где  — пьезомодуль керамики ЦТС-19.
— пьезомодуль керамики ЦТС-19.
Коэффициент преобразования акселерометpа по напряжению равен
 , (7.3)
, (7.3)
Таким образом, напряжение сигнала на выходе акселеpометpа будет:
Так как акселеpометp соединяется с виброизмерительным усилителем, имеющим входную емкость Су, дополнительным коаксиальным кабелем с погонной емкостью Ск, то коэффициент преобразования акселеpометpа, приведенный ко входу ВИУ, можно определить по формуле:
где  — собственная емкость акселерометра с инвентарным соединительным кабелем (с которым производилась его калибровка), пФ;
— собственная емкость акселерометра с инвентарным соединительным кабелем (с которым производилась его калибровка), пФ;  — погонная емкость дополнительного кабеля, пФ/м;
— погонная емкость дополнительного кабеля, пФ/м;  — емкость входной цепи усилителя (масштабного конденсатора, шунтирующего вход согласующего усилителя), пФ.
— емкость входной цепи усилителя (масштабного конденсатора, шунтирующего вход согласующего усилителя), пФ.
Из приведенных формул видно, что для обеспечения высокой чувствительности виброизмерительного тракта необходимо стремиться к уменьшению длины соединительных кабелей и емкости масштабного конденсатора.
Виброизмерительный усилитель предназначен для масштабного усиления сигналов вибродатчиков (пьезоакселерометров), пропорциональных ускорениям рельсов, двухкратного интегрирования этих сигналов для получения вспомогательного сигнала, пропорционального виброперемещениям рельсов, и формирования выходного диагностического сигнала по максимальному значению (модулю) виброускорений или виброперемещений рельсов при динамическом воздействии их с дефектным колесом.
Если при ударе колеса с ползуном глубиной 1,0 мм возникают ускорения рельса порядка 200 (для грузового вагона в зимних условиях), то на входе согласующего усилителя будет сигнал амплитудой 0,6÷1,8 В в зависимости от коэффициента преобразования акселерометров, подобранных в комплект ДИСК-К.
7.3. Индуктивные датчики в системе счета осей
Следующая группа датчиков характеризуется формированием информационных сигналов о движении оси вагона путем амплитудной модуляции выходного напряжения ДСО. К их числу относятся датчики индуктивного типа [20]. Чувствительным элементом датчика являются катушки индуктивности, параметры которых изменяются при движении колеса над ними. Катушки питаются переменным током. Выходной сигнал датчика — амплитуда напряжения.
ДСО с использованием амплитудной модуляции имеют тот же недостаток, что и датчик магнитного типа. Передаваемая ими информация искажается под действием электромагнитных помех, следовательно, не обеспечивается передача информации об осях на большие расстояния (сотни метров, километры).
Потребность в передаче информационного сообщения на эти расстояния вызвана активным внедрением на дорогах систем контроля занятости перегона на основе ДСО. При этих системах датчики устанавливаются на границах станции, а станционные блоки размещаются в помещениях.
Датчик представляет собой две катушки индуктивности, монтируемые по разным сторонам шейки рельса напротив друг друга. Катушки имеют длину 600 мм и подключаются специальным антивибрационным кабелем к блоку преобразования, размещенному в нескольких метрах от рельса. В блоке формируется напряжение питания катушек и выходное напряжение ДСО преобразуется в помехозащищенный сигнал.
При отсутствии колеса над датчиком выходное напряжение с катушек индуктивности преобразуется в две частотные последовательности импульсов. Выходы формирователей последовательностей согласуются с соединительными проводами питания «счетного пункта». В станционной части системы две частотные последовательности выделяются фильтрами.
От движения колеса над датчиком изменяется коэффициент взаимоиндукции и, в зависимости от направления движения, исчезает одна или другая частотная последовательность. Формирователи «счетного пункта» отключают частотные последовательности в процессе движения и при остановках. В станционных счетчиках осей определяется пропадание частотного сигнала, по которому устанавливается направление движения и выполняется счет осей.
7.4. Многофункциональные датчики
Многофункциональный датчик (МФД) с частотно-модулированным выходным сигналом разработан и эксплуатируется на Октябрьской железной дороге. На основе МФД и специального электронного блока преобразования сигнала (конвертера) изготовлены комплекты аппаратуры для системы ДИСК-Б, информационная система контроля занятости перегона, комплект аппаратуры для счета вагонов в отцепах.
Для модуляции сигнала используются два электронных генератора. Небольшие катушки индуктивности генераторов расположены вдоль широкой поверхности датчика вблизи зоны движения гребня и разнесены друг от друга на расстояние в несколько сантиметров. Движущийся над поверхностью датчика гребень изменяет частоты генераторов и вызывает изменение выходной частоты прямоугольных импульсов датчика. Схемное решение датчика выполнено так, что совместно с частотной модуляцией происходит модуляция длительности выходного импульса. Это дополнительно повышает помехозащиту и информативность МФД. В результате многолетней эксплуатации датчиков было установлено, что для колес вагонов средняя градуировочная характеристика имеет вид, показанный на рис.7.2. Использование зависимости выходной частоты от положения оси колеса над датчиком расширяет информационные свойства датчика, так как в процессе движения оценивается их взаимное положение. Рассмотрим наиболее простой критерий определения прохода оси над датчиком. Считаем, что ось прошла, если частота изменялась относительно начального значения Fo как в большую, так и в меньшую сторону.

Рис.7.2. Градуировочная характеристика многофункционального датчика с
частотно- модулированным выходным сигналом
Частотно-модулированный сигнал может обрабатываться средствами вычислительной техники, так как достаточно просто преобразуется в код. Однако существование большого количества систем, воспринимающих сигнал о движении оси в виде импульса напряжения, потребовало для согласования с ними соответствующего преобразования.
Преобразование частотного сигнала МФД в импульс напряжения происходит в конвертере, функциональная схема которого приведена на рис. 7.3. Кроме предоставления информации об осях, в конвертере предусмотрены другие информационные выходы, которые допускают использование МФД в существующих и разрабатываемых системах.

Рис. 7.3. Схема преобразования частотного сигнала МФД
МФД запитывается от источника питания линии (ИПЛ) через измерительный резистор R и и двухпроводную соединительную линию. На измерительном резисторе выделяется напряжение, определяемое током потребления МФД и его выходными прямоугольными токовыми импульсами.
Источник питания конвертоера (ИПК) формирует напряжение питания для остальных элементов.
После прохождения импульсов через интегрирующую цепь (ИЦ) прямоугольная последовательность преобразуется в пилообразную. Это позволяет настроить компаратор (К) на оптимальный прием и через гальваническую развязку (ГР1) формировать импульсы на входе порта Р1.1 микропроцессорного контроллера (МК). МК обрабатывает мгновенные значения частотного сигнала МФД за время, равное периоду следования входных импульсов порта Р1.1.
Алгоритм обработка сигналов МФД включает в себя измерение текущих значений периода и длительности импульсов, сравнение их с исходными значениями и установление факта изменения (неизменности) частоты. Каждый период в МК принимается решение о движении оси, для чего сравниваются результаты обработки периода и длительности импульсов. Окончательное решение принимается по результатам сравнений за несколько периодов. Такой способ эквивалентен обработке сигналов датчика по нескольким каналам и создает информационно надежную систему. Во время движения колеса над датчиком в МК отслеживаются изменения выходной частоты датчика на соответствие градуировочной характеристики и определяется время движения гребня через зону чувствительности МФД. После установления факта прохода колеса формируется импульс напряжения оси, например, через разряд DO регистра РГ.
Выходные информационные сигналы конвертера передаются в систему через гальванические развязки ГР2—ГР4, выполненные на оптоэлектронных парах типа АОТ123. Выходной фототранзистор оптопары управляется записью соответствующего бита в выходные разряды регистра РГ.
Длительность импульса оси устанавливается программно. Для системы ДИСК-Б нужен биполярный импульс длительностью, равной времени движения гребня над датчиком. Формирование импульса другой полярности на «Вых. 2». обеспечивается источником питания Е2 с полярностью, противоположной Е1. После окончания импульса с «Вых. 1» (в разряд DO установлен логический 0) в разряд D 1 контроллер записывает логическую 1, формируя импульс противоположной полярности на «Вых. 2». Длительность этого импульса также равна времени движения колеса над датчиком. Для системы ДИСК-Б оба выхода объединяются.
В системах ГАЦ, учитывающих направление движения, второй выход используется для указания направления движения. На этом выходе импульс напряжения формируется синхронно с импульсом оси только в случае движения в определенном направлении, например, с горки.
Третий выход «Вых. 3» конвертера предназначен для диагностики работоспособного состояния МФД и конвертера со стороны системы. Вид сигнала диагностики определяется конкретной системой. Представление работоспособного состояния в виде логической 1 определено требованием использования МФД в системах, обеспечивающих безопасность движения.
После подачи напряжения питания и выхода МК на рабочие алгоритмы в разряде D 2 инвертируется бит синхронно с поступлением импульсов датчика. Формирователь динамической единицы (ФДЕ) при поступлении импульсов с разряда D2 регистра зажигает диод гальванической развязки ГР4, устанавливая логическую 1 на «Вых. З». Прекращение появления импульсов на выходе D2 приводит к установке логического 0 на «Вых. З», свидетельствуя о нарушении работы конвертера или датчика.
Аппаратно-программные средства конвертера выявляют основные отказы и информируют об этом систему. Нарушение функционирования МФД может выражаться в изменении тока потребления или в существенном отличии частот от значений, определенных градуировочной характеристикой. Настройка компаратора и выбор определенных параметров интегрирующей цепи выявляет отказы, выраженные через изменения тока потребления датчика. Определение этого отказа, как и выявление отказа от существенного изменения частоты, происходит в микропроцессорном контроллере на программном уровне, позволяя МК снимать посылку импульсов в разряд D2. Отказы в ИПЛ, ИПК, обрывы соединительной линии и выход из строя компаратора также вызывают появление сигнала о неработоспособном состоянии [20].
Позиционный отказ (например, из-за несанкционированного съема МФД с рельса) обнаруживается в МК через изменения тока потребления или частоты. Для этого разработаны крепежные устройства МФД, обеспечивающие изменение одного из этих параметров при его демонтаже. Введение сигнала с ФДЕ в цепь «Вых. 3» позволяет системе получать сведения об отказах в работе МК при «зависании» программ или выходе контроллера из строя (в этом случае прекращается изменение значения бита в разряде D2). Исключению «зависаний» способствует генератор сброса ГС, формирующий импульс сброса при «сбоях» программы МК.
Основные элементы конвертера расположены на плате размерами 100х80 мм. Стабилизаторы источников питания выносятся на отдельную металлическую пластину. В качестве МК используется микросхема АТ89с51, позволяющая выполнять обработку сигналов МФД при максимальных скоростях движения 50—70 м/с.
На основе МФД и конвертеров изготовлены, всесторонне испытаны и введены в эксплуатацию комплекты аппаратуры для систем ДИСК-Б, информационная система контроля занятости перегона, комплект аппаратуры для счета вагонов в отцепах.
7.5. Индукционные электромагнитные путевые датчики
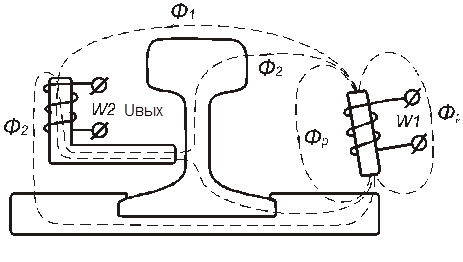
Рис. 7.4. Индукционный электромагнитный путевой датчик
Магнитный поток катушки, без учета магнитного потока рассеивания (Фр), определяется выражением
 , (7.6)
, (7.6)
Подставляя значение уравнения 7.6 в уравнение 7.1, получим уравнение для определения ЭДС, наводимой в обмотке W 2 первичного преобразователя магнитным потоком Ф1
 , (7.7)
, (7.7)
где:  — число витков передающей катушки (источника связующего
— число витков передающей катушки (источника связующего
магнитного поля);  — число витков приемной катушки;
— число витков приемной катушки;  — эквивалентная площадь катушки первичного преобразователя (приемной катушки);
— эквивалентная площадь катушки первичного преобразователя (приемной катушки);  — круговая частота;
— круговая частота;  — амплитудное значение переменного тока передающей катушки; К 1 – коэффициент связи обмоток, учитывающий соотношение магнитных потоков полного (с учетом потоков рассеивания) и сцепляющегося с приемной катушкой.
— амплитудное значение переменного тока передающей катушки; К 1 – коэффициент связи обмоток, учитывающий соотношение магнитных потоков полного (с учетом потоков рассеивания) и сцепляющегося с приемной катушкой.
Изменяя взаимное расположение передающих и приемных катушек, а так же частоту генерируемого сигнала можно создать индукционный электромагнитный путевой датчик, у которого при проходе колеса сигнал в приемных катушках возрастет. По такому принципу построен датчик в системе счета осей AzS 350 фирмы » SIEMENS «.
7.6. Путевой датчик системы УКП СО
Путевой датчик (ПД) типа ДПЭП системы УКП СО является источником первичной информации о количестве осей подвижного состава, которые проследовали по участку пути, контролируемому датчиком занятости участка пути (РЦ). Датчик [43, 20] представляет собой электромагнитную систему с переменными параметрами, входным электрическим сигналом которой является высокочастотное переменное напряжение генератора, расположенного в аппаратуре счетного прибора (СП) [45]. Напряжение выходного сигнала ПД зависит от параметров магнитной системы, которые изменяются при появлении и проследовании колеса над датчиком.
Эквивалентная электрическая схема ПД, соответствующая рис. 7.5, а приведена на рис. 7.5, б. Здесь емкость СЭ1 эквивалентно представляет собой сумму емкостей С1 (см. рис. 7.5, а) и распределенной емкости жил кабеля от ПД до СП, а емкость СЭ2 – эквивалентную емкости других жил того же кабеля. Величина взаимоиндуктивности Ми-к, как было сказано, зависит от наличия или отсутствия колеса над магнитной системой ПД [49].

Рис. 7.5. Упрощенная конструкция и эквивалентная схема путевого датчика устройства контроля перегона методом счета осей УКП СО
Наличие высокочастотного напряжения U ген и соответствующего ему тока i инд в индукторе накладывает ряд особенностей на процессы работы ПД. В первую очередь это вызвано тем, что металлические массы колеса при воздействии на них переменного высокочастотного магнитного поля изменяют свои магнитные свойства за счет увеличения потерь на перемагничивание, гистерезис, проявление поверхностного эффекта и т.д. Эти изменения приводят к тому, что наличие колеса в магнитной цепи датчика становится эквивалентным внесению в нее массы, близкой по свойствам алюминиевой (или, например, медной, латунной). Поэтому имитатор колеса, используемый при технологических проверках ПД, выполнен в виде алюминиевой пластины. Снижение частоты f ген напряжения питания датчика, при котором масса колеса будет проявлять ферромагнитные свойства, нежелательно из-за значительного снижения чувствительности датчика.
7.7. Заключение
В настоящее время на отечественных железных дорогах и за рубежем в системах счета осей наибольшее распространение нашли индукционные датчики, которые обеспечивают работоспособность в разнообразных климатических условиях, при наличии мощных магнитных полей тягового тока и полей тяговых двигателей и не оказывают заметного биологического воздействия на окружающую среду.
Индукционные датчики в силу простоты их схемных и конструктивных решений и, как следствие повышенной надежности являются наиболее распространенным типом бесконтактного датчика и применяются на железных дорогах многих стран в двух основных модификациях: магнитоиндукционных (с источником связующего поля – постоянным магнитом) и индукционных электромагнитных (с переменным магнитным полем).
Существенный выигрыш по информационным и эксплуатационным показателям может быть достигнут при использовании частотных параметрических модуляторов в путевых датчиках. В датчиках такого класса фиксация прохождения колесной пары осуществляется изменением одного из параметров генератора (например, индуктивности приемной катушки), что приводит к изменению частоты генерируемых колебаний.
