Системы «шаг—газ» вертолетов с поршневыми двигателями
При перемещении рычага общего шага изменение общего шага несущего винта происходит обычно по линейному закону. В то же время закон изменения мощности двигателя, управление которым кинематиче
ски связано с рычагом общего шага, делается нелинейным, путем введения в кинематику специального кулачка.
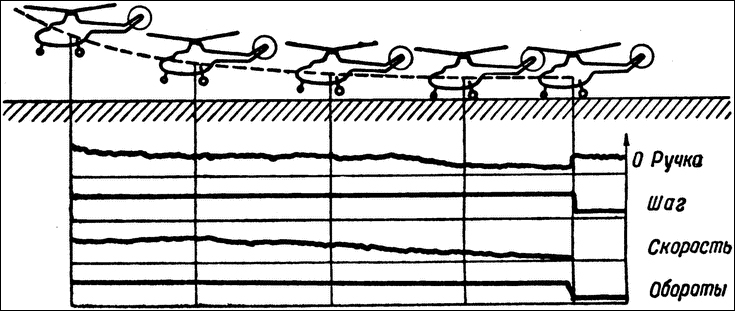
Исходя из характеристик поршневого двигателя конструктивно оказалось возможным применить довольно простую кинематическую связь между изменением общего шага несущего винта и мощностью двигателя. В этом случае при перемещении рычага общего шага, связанного, с управлением двигателя, мощность последнего изменяется таким образом, что при разных значениях общего шага обороты несущего винта остаются приблизительно постоянными. Имеющаяся на рычаге общего



 -Моторное птаниродание
-Моторное птаниродание
‘Участой характеристики подбирается исходя из необходимости предот6растить раскрутки’ несущего динта при. Выходе на рабочие режимы
шага поворотная рукоятка коррекции дает летчику возможность через ту же кинематическую связь корректировать мощность двигателя без изменения шага несущего винта. Диапазон коррекции в данном случае относительно невелик и довольно редко используется летчиком в полете.
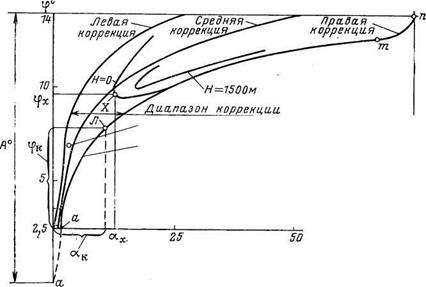
При проектировании такого управления необходимо исходить из характеристик двигателя, т. е. знать закон изменения его мощности в зависимости от подачи топлива в диапазоне заданных высот полета вертолета. Кроме того, надо иметь характеристики основных режимов полета вертолета, т. е. соотношение общего шага несущего винта и мощности (на висении, горизонтальном полете, планировании и авторотации). Исходя из этого можно построить график (рис. 3. 14), из которого видно, как надо осуществить кинематическую связь управления общим шагом и мощностью двигателя для обеспечения нормального управления вертолетом.
Величина коррекции должна охватывать такой диапазон изменения мощности двигателя, при котором обеспечивались бы все указанные режимы полета вертолета.
При построении такого графика надо учитывать имеющуюся автоматику на двигателе, влияющую на подачу топлива при изменении высоты полета (РПД), т. е. иметь все необходимые высотные характеристики его работы.
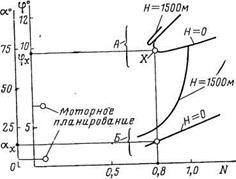
Рис. 3.15. График зависимости^ между шагом несущего винта и потребной мощностью для разных режимов полета (кривые А) и график зависимости между мощностью и углом поворота рычага дросселя (кривые Б):
d—угол поворота рычага дросселя
Приведем методику определения кинематики системы «шаг—газ» для вертолета Ми-4 с поршневым двигателем. Для проектирования необходимо иметь следующие данные:
1) график зависимости между шагом несущего винта и потребной мощностью для разных режимов полета, показанный на рис. 3. 15 (кривые А)
2) зависимость между мощностью двигателя и углом поворота рычага дросселя, показанные на рис. 3.15 (кривые Б).
Имея эти зависимости, можно построить зависимость между шагом несущего винта (р и углом поворота рычага дросселя а для разных режимов полета.
Построение производится по точкам. Взяв произвольную точку X на кривой А (см. рис. 3. 15), определяем шаг и мощность ей соответствующие, затем по кривой Б определяем для точки X угол поворота рычага дросселя соответствующий ранее найденной мощности. Зная фх и а*, наносим точку X (см. рис. 3. 14).
Система управления вертолёта.
Управление предназначено для перемещения вертолёта в пространстве относительно трёх осей (продольной, поперечной, вертикальной) путём изменения значения и направления аэродинамической силы НВ и силы тяги РВ. К управлению относятся: автомат перекоса, продольно-поперечное управление, путевое управление, объединённое управление «шаг – газ», раздельное управление двигателями, управление остановом двигателей, управление тормозом НВ.
Автомат перекоса предназначен для изменения углов установки лопастей НВ как на одинаковый, так и на циклический шаг.
 Регулировочные данные: наклон тарелки АП при нейтральном положении ручки управления – вперёд 1º30′, влево 0 º30 ‘; предельные углы наклона – вперёд 7º +5’ -12′, назад 5 º +5′ -12′, вправо 3º24’±12′, влево 4º12’±12′. При срабатывании гидроупора наклон тарелки назад составляет 2º±12′. Ход ползуна 47 ± 1 мм. Зазор (при φл=1º) 0,3…0,5 мм. Угол опережения управления 21º.
Регулировочные данные: наклон тарелки АП при нейтральном положении ручки управления – вперёд 1º30′, влево 0 º30 ‘; предельные углы наклона – вперёд 7º +5’ -12′, назад 5 º +5′ -12′, вправо 3º24’±12′, влево 4º12’±12′. При срабатывании гидроупора наклон тарелки назад составляет 2º±12′. Ход ползуна 47 ± 1 мм. Зазор (при φл=1º) 0,3…0,5 мм. Угол опережения управления 21º.
Элементы АП: направляющая ползуна, ползун с бронзовым подшипником, кардан, тарелка с двухрядным шарикоподшипником, привод тарелки с хомутом, тяги поворота лопастей, кронштейн ползуна, рычаг общего шага, качалка поперечного управления, качалка продольного управления. Кардан двухстепенной, имеет внутренние и внешние кольца, пальцы для крепления тяг продольно-поперечного управления. Регулировка и контроль наклона тарелки АП производится по шкале (на качалке) и нониусу.
Система продольно-поперечного управления служит для управления вертолётом в продольном и поперечном направлениях. Включает в себя две ручки продольно-поперечного управления, два пружинных загрузочных механизма, два компенсационных датчика, гидравлический упор, два гидроусилителя КАУ – 30Б, проводку управления.
Механизмы загрузки служат для имитации усилий на рычагах управления и повышения чувствительности управления. Установлены на стенке шпангоута 5Н. они создают положительный градиент усилий на ручке циклического шага и на педалях ножного управления. Усилия на ручке составляют в продольном направлении до 11 кг и в поперечном – до 9 кг. Электромеханизм ЭМТ-2М служит для снятия нагрузок с ручки управления на установившихся режимах полёта. Управляется кнопкой «Триммер». Рекомендуется снимать нагрузки кратковременным нажатием на кнопку «Триммер» после небольших перемещений ручки.
Гидравлический упор ограничивает наклон тарелки автомата перекоса назад до 2º путём ограничения свободного хода ручки циклического шага. Включает гидроцилиндр на шп. 5Н, двухплечую качалку с роликом, два концевых выключателя на амортстойках и кран гидросистемы ГА – 192. В момент приземления вертолёта срабатывают концевые выключатели, открывается кран ГА – 192, гидрожидкость под давлением поступает в цилиндр гидроупора и выдавливает шток, который ограничивает ход качалки управления. При взятии ручки «на себя» и наклоне тарелки АП более 2º на ручке возникают дополнительные усилия до 15 кг. После отрыва вертолёта гидроупор выключается.
Предупреждение: Значительное взятие ручки управления «на себя» за нейтральное положение, при шаге НВ менее 3º по УШВ (–1º), запрещается во избежание касания концами лопастей хвостовой балки.
Управление включает в себя: две педали, загрузочный механизм ЭМТ – 2М, смешанную проводку управления, гидроусислитель РА – 60Б, винтовой механизм управления РВ. Педали параллелограмные, горизонтальные, регулируемые по росту пилота в пределах 75 мм. Ход педалей ±100 мм. На подножках смонтированы гашетки с концевыми выключателями для выключения и включения канала направления автопилота АП – 34Б. Триммерный механизм ЭМТ-2М управляется кнопкой «Триммер» на ручке. Винтовой механизм вмонтирован в хвостовой редуктор. Он состоит из корпуса звёздочки, червяка, шлицевой гильзы и штока. Проводка управления смешанная, включает в себя жёсткую часть проводки, качалку, звено и сектор на плите главного редуктора, двухстороннюю двойную тросовую проводку с роликами и текстолитовыми направляющими, ролико-втулочную цепь.
Предупреждение: Развороты на висении у земли разрешается выполнять с угловой скоростью не более 12 град/сек.(Полный оборот не менее чем за 30 сек). Полную перекладку педалей выполнять не быстрее чем за 3 сек.
Система объединенного управления «шаг-газ» предназначена для одновременного управления общим шагом НВ и режимом работы двигателей. Управление включает в себя две ручки «шаг-газ», замыкающий вал, проводку управления общим шагом, проводку управления двигателями, Гидроусилитель КАУ – 30Б.
Левая ручка «шаг-газ» – самостоятельный агрегат. Она имеет основание, стальную ось с плавающим поршнем, рычаг общего шага, дисковый пружинный фрикцион, маховик для затяжки фрикциона с усилием на ручке 20…25 кг, ручку коррекции с фрикционом и кулачком, головку. На головке смонтированы: кнопка растормаживания фрикциона ручки «шаг-газ», кнопка управления фарами, кнопка тактического и аварийного сброса грузов. Диапазон отклонения рычага 56º, что соответствует 47 мм хода ползуна автомата перекоса. Диапазон поворота рукоятки коррекции 90º.
Замыкающий вал находится под полом. Состоит из двух концентричных валов-качалок независимого вращения. Внутренний вал замыкает цепь управления двигателями и соединён с рукояткой коррекции, а внешний вал замыкает цепь управления общим шагом и соединён с рычагом шага.
Проводка управления общим шагом включает жёсткие тяги, качалки, направляющие ролики и качалку агрегата управления. Проводка управления двигателями включает жёсткие тяги, качалки дифференциального узла, блок валов.
Предупреждение: Газотурбинные двигатели, установленные на вертолёте обладают плохой приёмистостью, поэтому при резком увеличении «шаг-газа» происходит перетяжеление несущего винта, а при резком сбросе «шаг-газа» возникает раскрутка винта, так как он становится лёгким. Для исключения перетяжеления и раскрутки НВ рычаг «шаг-газ» рекомендуется перемещать при взлётах и посадках за время не менее 10 сек или с темпом изменения шага НВ, равным 1 град/сек.
Раздельное управление двигателями служит для изменения режима работы каждого двигателя без изменения шага НВ. Обеспечивает раздельный запуск и опробование двигателей, а так же переход работающего двигателя на повышенный режим при отказе другого. Рычаги раздельного управления двигателями (РРУД) смонтированы на основании левой ручки «шаг-газ» и снабжены фиксаторами и фрикционными муфтами. Усилия на рычагах 3…4 кг. РРУД соединены тягами с дифференциальным узлом, который крепится под полом. Дифференциальный узел состоит из двух концентричных валов с рычагами и двух угловых качалок.
1. При раздельном опробовании двигателей
— вертолёт должен иметь массу не менее 8500 кг. После запуска прогреть двигатели на МГ, проверить параметры двигателей;
— ввести коррекцию вправо, РРУД неопробуемого двигателя переместить вниз, а опробуемого вверх;
— ручкой «шаг-газ» затяжелить винт и установить последовательно режимы двигателю: крейсерский, номинальный, взлётный. В течении 10-15 секунд проверить параметры двигателя на каждом режиме;
— поменять положение РРУД и опробовать другой двигатель.
Проверку совместной работы двигателей в режиме висения или на привязи производить при правой коррекции рычагом «шаг-газ», РРУД в среднем положении, на защёлках.
2. При отказе двигателя:
— отказ сопровождается изменением параметра шума от работы двигателей, изменением углового положения вертолёта (пикирование, разворот и крен вправо с уменьшением высоты полёта), падением оборотов НВ;
— автоматика выводит работающий двигатель на повышенный режим. Определить отказавший двигатель, закрыть его стоп-кран и пожарный кран, а РРУ работающего двигателя перевести вверх;
— установить оптимальный режим для полёта с одним двигателем (Vп = 120…130км/ч, nнв = 92…93%), произвести вынужденную посадку.
Управление остановом двигателей включает две ручки управления, тросовую проводку, промежуточный ролик с качалкой, тягу до стоп-крана на насосе-регуляторе НР-40ВА. Ручки фиксируются в крайних положениях стопором и пружиной. Для пользования следует нажать кнопку «Запуск» на 2-3 секунды и перевести ручку останова двигателя в положение «открыто». Выключение двигателя производится переводом ручки в положение «Закрыто» после охлаждения его на режиме МГ в течении 1…3 мин.
Управление тормозом НВ включает ручку со стопором, тросовую проводку, пружину с усилием 150 кг, поводок тормозного механизма, установленного на главном редукторе. Управление тормозом сблокировано с системой запуска двигателей через концевой выключатель, чтобы исключить запуск двигателей с заторможенным НВ. Цепь запуска двигателей замыкается только при нижнем положении ручки тормоза. При отказе концевого выключателя двигатели не запустятся. Рекомендуется включать тормоз на оборотах НВ 8…10%.
Дата добавления: 2016-05-25 ; просмотров: 6370 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
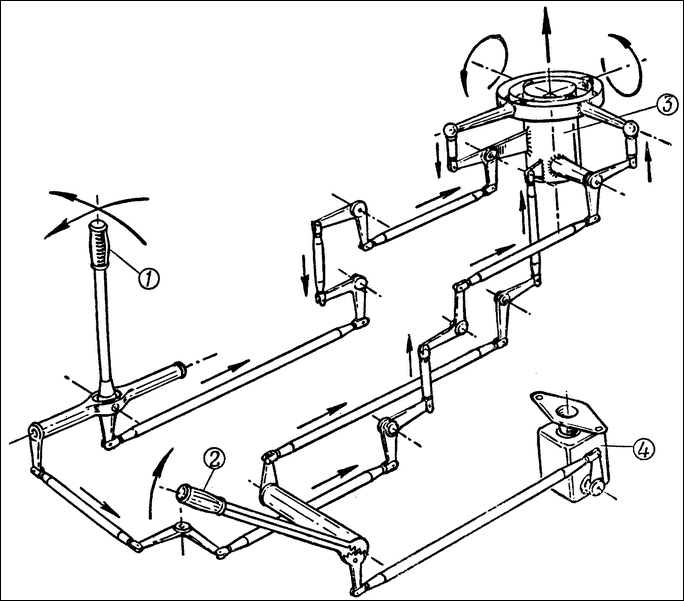
Объединенное управление общим шагом несущего винта и двигателями
Управление общим шагом НВ и двигателями на вертолете осуществляется рычагом общего шага 1, который кинематически связан с ползуном АП при помощи рычага 10 и одновременно с рычагами 8 топливного агрегата, расположенными на двигателях.
Рычаг общего шага с системой фиксации в любом положении располагается слева от сидения летчика. Для фиксации рычага служат фрикционные устройства с ручным или гидравлическим управлением.
Изменение общего шага связано с управлением мощностью двигателей вертолета либо посредством механической кинематической связи, либо автоматически через стабилизатор частоты вращения. В обоих случаях обеспечивается поддержание заданной частоты вращения НВ при изменении общего шага, т.к. одновременно соответственно изменяется мощность двигателя. В случае механической связи шага с газом ручка шага имеет специальную поворотную рукоятку коррекции, соединенную с дросселем (рычагом подачи топлива) двигателя. При помощи этой рукоятки летчик может корректировать частоту вращения НВ в допустимых пределах независимо от его шага.
Автоматическое регулирование частоты вращения НВ при изменении его общего шага, угла атаки и скорости полета вертолета осуществляется обычно путем изменения подачи топлива в двигатели. Автономная система регулирования силовой установки может быть расположена непосредственно в двигателе. Она обеспечивает как изменение его мощности вручную в диапазоне от малого газа
до взлетного режима, так и автоматическое поддержание заданной частоты вращения НВ постоянной. Данная система регулирования двигателей может работать и без ручного управления «шаг-газ», т.е. рычаг общего шага может изменять только величину шага без изменения положения рычага подачи топлива, который должен быть переведен в положение «автомат». Перестраивая регулятор частоты вращения, можно менять ее диапазон ограничения, что необходимо для получения оптимальных режимов работы силовой установки в зависимости от высоты и скорости полета.

Возможна и другая система автоматического регулирования частоты вращения НВ, в которой используется стабилизатор — автоматический регулятор подачи топлива, включенный в систему ручного правления «шаг-газ» через раздвижную тягу. Летчик в любой момент может вмешаться в управление. Стабилизатор может быть выключен в случае какой-либо его неисправности. Раздвижная тяга, работающая от стабилизатора частоты вращения, автоматически становится в нейтральное положение, обеспечивая этим возможность нормального ручного управления.
Диапазон работы стабилизатора частоты вращения через раздвижную тягу может составлять до 40—50% полного хода рычага подачи топлива на двигателях. Включение стабилизатора частоты вращения в неполном диапазоне управления увеличивает безопасность при его отказе. В то же время наличие ручного управления дает возможность летчику при резких изменениях режима полета вмешаться в управление и увеличивать диапазон, необходимый стабилизатору. При отказе одного из двигателей автомат выводит работающий двигатель на увеличенную мощность вплоть до взлетной и выше — в зависимости от режима полета. При наличии стабилизатора частоты вращения рукояткой коррекции летчик не пользуется, но ее целесообразно сохранить для работы при отказе автоматики.
Для раздельного выключения двигателей в кабине летчиков имеются рукоятки управления кранами останова, располагаемые в удобном для управления месте.
Для аварийного выключения двигателей (в случае пожара) летчик дополнительно может прекратить подачу топлива в двигатели при помощи пожарных кранов.
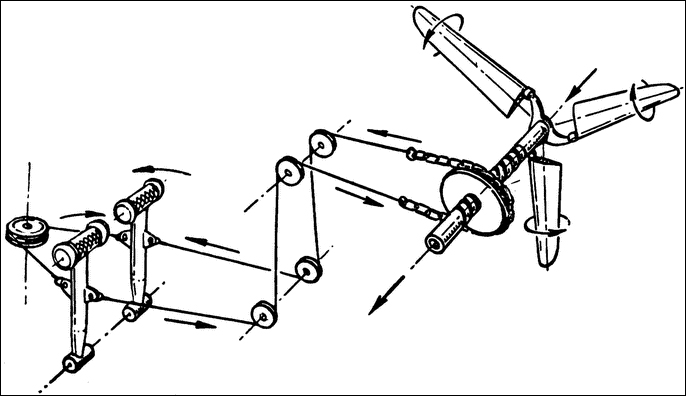
Характер зависимости изменения угла установки стабилизатора от общего шага НВ.
Управление вертолетом.
Здравствуйте!

Взлет МИ-8 в зоне воздушной подушки.
Мы с Вами уже выяснили как, в принципе, управляется вертолет, и как работает автомат перекоса. А сегодня внесем некоторую ясность в вопрос о том, какую роль во всем этом играет пилот. Какие даны ему органы управления для решения вобщем-то непростой задачи, каковой является управление вертолетом
С самолетом все более-менее понятно. У него есть две самостоятельные системы: система управления самолетом (собственно управление рулями и элеронами) и система управления двигателем. И органы в кабине экипажа в количестве трех штук 🙂 : ручка управления самолетом (РУС), ручка управления двигателем (РУД), и педали для управления рулем направления. Как в этом плане обстоят дела у вертолета?…
Начнем с того, что определим более конкретно типы управления вертолетом.
Что такое « шаг-газ ». Дело в том, что угол установки лопастей несущего винта (общий шаг) и обороты двигателя связаны. Ведь если увеличить угол, то возрастет величина аэродинамических сил, действующих на лопасти. Увеличивается и подъемная сила, и сила сопротивления. Винт, как говорят, нагружается. Двигатель, находясь на определенном уровне мощности не может «обслужить» возросшую нагрузку и может начать терять обороты. Тяга винта, соответственно, может уменьшиться.
Чтобы этого не происходило, была придумана система шаг-газ, которая одновременно с увеличением угла установки лопастей подает команду в топливную автоматику на увеличение оборотов (то есть «увеличиваешь шаг – даешь газ» и наоборот), тем самым исключая падение мощности двигателя.
Теперь о том, что у нас в кабине. У пилота есть собственно две ручки управления вертолетом.
Первая – ручка управления циклическим шагом винта (или просто ручка управления вертолетом). Она самолетного типа, расположена перед креслом пилота, и с ее помощью осуществляется продольное и поперечное управление вертолетом. От нее через специальную систему тяг и качалок воздействие передается на тарелку автомата перекоса, которая, в свою очередь, определяет циклический угол установки лопастей.
Системы управления циклическим и общим шагом винта.

Кабина вертолета. Хорошо видны спаренные ручки управления и ручки шаг-газ.
Вторая – ручка управления общим шагом винта или, как ее еще называют « ручка шаг-газ ». Эта ручка обычно расположена слева от кресла пилота и перемещается вертикально вверх-вниз. С ее помощью осуществляется вертикальное управление путем одновременного воздействия на автомат перекоса и систему изменения оборотов двигателя. Обычно обороты двигателя меняются на первой трети перемещения ручки, далее уже меняется только общий шаг винта.
Отдельно от шага винта мощность двигателя может меняться только в небольших пределах для необходимой корректировки. Для этого на ручке шаг-газ существует специальный корректор ( обычно что-то типа поворотного кольца).
На схеме под номерами: 1 — ручка управления циклическим шагом; 2 — ручка шаг-газ; 3 — автомат перекоса; 4 — агрегат системы управления двигателем.
Система управления шагом рулевого винта.

Кабина вертолета. Хорошо видны ручка управления и правая педаль.
При использовании всех описанных органов управления вертолетом, этот аппарат превращается в маневренную машину с довольно широкими возможностями.
Чуть-чуть подробнее о режиме взлета. Существует два способа взлета. Первый – « по вертолетному ». В этом случае вертолет взлетает вертикально с кратковременным зависанием на высоте 1,5-2 метров (контрольное висение), после чего производится разгон с набором высоты. Второй – «по самолетному». При этом вертолет разгоняется на земле, набирает скорость отрыва и взлетает с последующим набором высоты и скорости.
Способ взлета выбирается в зависимости от состояния самого аппарата и от внешних условий. Определяющим в этом плане является запас мощности двигателя, что вполне понятно :-). Этот запас, в свою очередь, зависит от массы вертолета (точнее взлетной массы) и от таких параметров состояния атмосферы, влияющих на параметры работы двигателя и несущего винта, как местное давление воздуха, температура и влажность (влияющие на плотность воздуха).
Взлет по вертолетному.
Кроме того на выбор способа взлета влияет размер и состояние поверхности площадки, на которой находится вертолет, наличие каких-либо препятствий по курсу взлета и обязательно направление и сила ветра у земли.
Чем выше барометрическая высота места взлета (ниже давление), чем выше температура и влажность воздуха, а также чем ниже скорость встречного ветра, тем ниже запас мощности двигателя, и тем ниже должна быть взлетная масса вертолета.
Воздух, отбрасываемый несущим винтом вниз тормозится у земли и образует как бы поддерживающую аппарат подушку. Такое может происходить обычно на совсем малом расстоянии от земной поверхности. Считается, что для вертолета это явление можно принимать во внимание, если расстояние от земли до плоскости вращения винта равно радиусу винта (или меньше). В этом случае прирост подъемной силы составляет 10-15%.
Первый случай выбирается тогда, когда взлетная площадка имеет ограниченные размеры и окружена высокими препятствиями, а также если она имеет сильное запыление или покрыта свежевыпавшим снегом. Режим работы двигателя при таком взлете – максимальный то есть запаса по мощности нет.
Это самый напряженный режим взлета, а при отказе двигателя (одного из двигателей) безопасная посадка не гарантирована. Вертикальный подъем должен осуществляться до высоты обеспечения прохода над препятствиями с превышением не менее 5 метров.
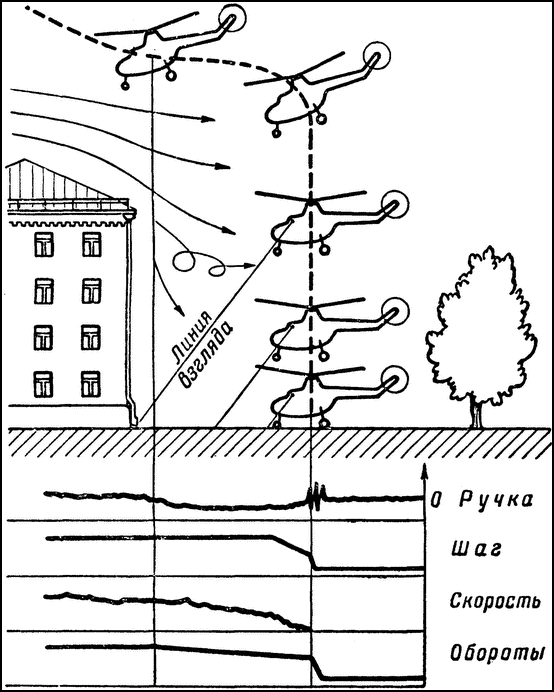
Взлет вне зоны воздушной подушки с площадки, ограниченной препятствиями.
Разгон по наклонной траектории может быть использован на такой же площадке, но с высотой препятствий до 5 метров. Запас мощности при таком взлете должен обеспечивать одновременный разгон с набором высоты. Должна быть гарантирована безопасная посадка в случае отказа двигателя (одного из двигателей).
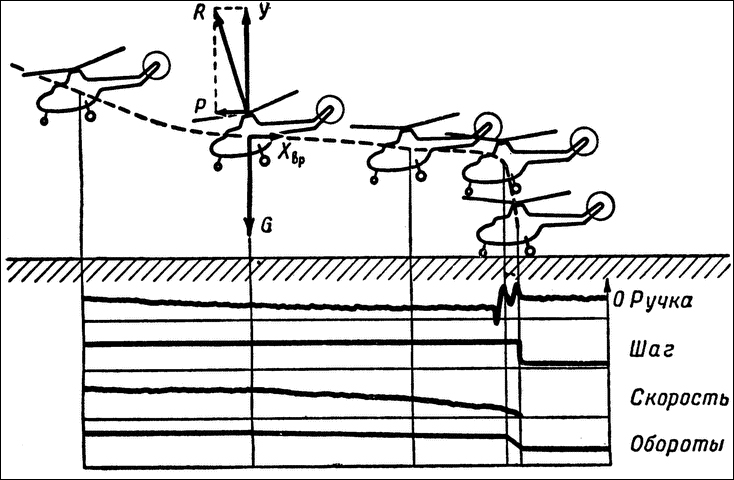
Взлет с разгоном в зоне воздушной подушки – самый распространенный способ взлета. Он обычно производится с аэродромов (вертодромов), имеющих открытые подходы. При этом двигатель работает обычно на номинальном режиме, то есть имеется запас мощности для необходимого, в случае чего :-), маневрирования. Вертолет после контрольного висения разгоняется вдоль земли с углом тангажа на пикирование в 10-15 º (иной раз и больше, и это очень эффектно :-)) и далее переходит в набор высоты. Этот взлет, кстати, – самое распространенное из того, что мы видим в кино.
Взлет по самолетному.
Вот так вкратце о возможностях взлета. О других рабочих (а также аварийных и специальных) режимах полета поговорим в следующих статьях и по пожеланиям трудящихся :-).
В конце статьи помещаю ролик, который уже есть в моей статье о турбовальном двигателе. Для сегодняшней статьи он подходит как нельзя лучше :-). Взлет с разгоном в зоне воздушной подушки. Правда не совсем типичный, а с применением еще одного элемента под названием шик, граничащий с воздушным хулиганством. Однако ведь до чего ж эффектно выглядит! :-). Летчик… Снимаю шляпу…
В довершении еще ролик « О том как летает вертолет». Последний, к сожалению, на английском языке. Но кое-какие полезные моменты с точки зрения управления в нем можно понять и так и они неплохо показаны. К сожалению более приемлемого материала в этот раз не нашел 🙁 …
